Initialisierung
Wenn der Benutzer einen Tracker auswählt, ist eine Initialisierungsphase erforderlich. Diese hängt vom ausgewählten Tracker ab.
Objekt-Tracker: Nach der Auswahl muss der Tracker die Szene „erlernen“, um den Hintergrund von sich bewegenden Objekten im Vordergrund zu unterscheiden.
Während des Erlernens der Szene wird in der Live-Ansicht die folgende Meldung angezeigt, und es werden in dieser Zeit keine Objekte verfolgt.
DL People Tracker & DL Object Tracker: Bei der ersten Auswahl führt die DL-Engine einen Modellgenerierungsprozess durch. Dadurch werden die DL-Modelle für die Ausführung auf der verfügbaren GPU-Hardware optimiert.
Unabhängig davon, welcher Tracker ausgewählt wird, werden das DL People Tracker-Modell, das DL Object Tracker-Modell und das DL Filter-Modell in einem Durchgang optimiert.
Dieser Vorgang kann bis zu 10 Minuten pro Modell dauern und sich je nach GPU-Konfiguration verlängern. Nach Abschluss des Vorgangs werden die optimierten Modelle im Konfigurationsordner gespeichert.
Der Vorgang muss nicht erneut ausgeführt werden, es sei denn, die GPU-Hardware wird gewechselt. Während der Optimierung wird in der Live-Ansicht eine Meldung angezeigt, und während dieser Zeit werden keine Objekte verfolgt.
Bitte beachten Sie: Der DL-Filter erfordert denselben Initialisierungsvorgang, zeigt jedoch keine Meldung an.
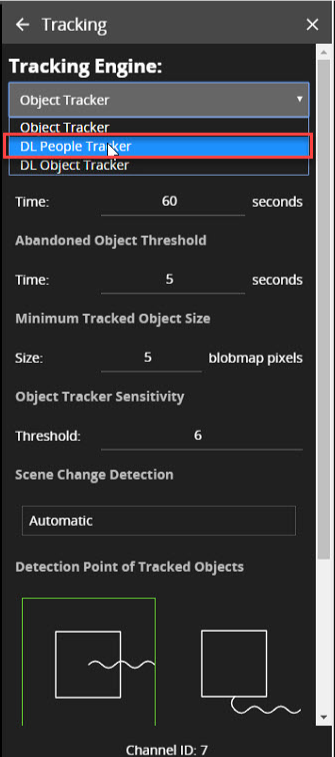
Nach der Initialisierung beginnt VCAserver mit der Analyse des Videostreams mit dem ausgewählten Tracker. Die für diesen Tracker spezifischen Einstellungen werden ebenfalls unterhalb der Auswahloption für die Tracker-Engine angezeigt.
Unabhängig vom ausgewählten Tracker kann jedes verfolgte Objekt durch die verfügbaren Regeln geleitet werden. In einigen Fällen sind bestimmte Regeln oder Algorithmen jedoch nur mit einem bestimmten Tracker verfügbar.
Beispielsweise sind der Deep-Learning-Filter sowie die Regeln für verlassene und entfernte Objekte nur mit dem Object Tracker verfügbar.
Object-Tracker
Der Objekt-Tracker ist eine bewegungsbasierte Erkennungs-Engine. Anhand der im Bild erkannten Veränderungen unterteilt der Algorithmus das Bild in Vordergrund und Hintergrund und verfolgt dabei jedes Objekt im Vordergrund, dessen Bewegung einen festgelegten Schwellenwert überschreitet. Der Objekt-Tracker verfügt über folgende Einstellungen:
Verweildauer für stationäre Objekte
Die Verweildauer für stationäre Objekte legt fest, wie lange ein Objekt von der Engine verfolgt wird, sobald es zum Stillstand gekommen ist.
Da Objekte, die zum Stillstand kommen, nach einer bestimmten Zeit in die Szene „eingebunden“ werden müssen, vergisst die Tracking-Engine Objekte, die nach Ablauf der Verweildauer für stationäre Objekte zum Stillstand gekommen sind.
Die Standardeinstellung beträgt 60 Sekunden.
Schwellenwert für zurückgelassene/entfernte Objekte
This threshold amount of time an object must be classed as abandoned or removed before an Abandoned / Removed rule will trigger.
Die Standardeinstellung beträgt 5 Sekunden.
Mindestgröße des zu verfolgenden Objekts
Die Minimale Größe des zu verfolgenden Objekts legt fest, wie groß das kleinste Objekt sein muss, das für die Verfolgung in Betracht gezogen wird.
Für die meisten Anwendungen wird die Standardeinstellung von 10 empfohlen. In bestimmten Situationen, in denen eine höhere Empfindlichkeit erforderlich ist, kann der Wert manuell festgelegt werden.
Niedrigere Werte ermöglichen es der Engine zwar, kleinere Objekte zu verfolgen, können jedoch die Anfälligkeit für Fehlalarme erhöhen.
Empfindlichkeit des Objekt-Trackers
Mit dem Wert für die Empfindlichkeit des Objekt-Trackers lässt sich der Objekt-Tracker so einstellen, dass Bewegungen unterhalb eines bestimmten Schwellenwerts ignoriert werden.
In Kombination mit der eingeblendeten Blob-Map-Annotation, die den Bereich der Szene visualisiert, in dem der Objekt-Tracker Bewegungen erkennt, kann dieser Wert angepasst werden, um Umgebungsrauschen herauszufiltern.
Die Standardeinstellung ist 4.
Erkennung von Szenenwechseln (Objekt-Tracker)
Erfahren Sie mehr über die Erkennung von Szenenwechseln.
Erkennungspunkt von verfolgten Objekten
Für jedes verfolgte Objekt wird ein Punkt verwendet, um die Position des Objekts zu bestimmen und zu prüfen, ob es eine Zone schneidet und eine Regel auslöst. Dieser Punkt wird als Erkennungspunkt bezeichnet.
Es gibt 3 Modi, die den Erkennungspunkt relativ zum Objekt definieren:
Automatisch
Im automatischen Modus wird der Erkennungspunkt automatisch basierend auf der Konfiguration des Kanals festgelegt.
Er wählt „Centroid“ (Mittelpunkt), wenn die Kamera von oben kalibriert ist, oder „Mid-bottom“ (Mitte unten), wenn die Kamera seitlich kalibriert oder nicht kalibriert ist.
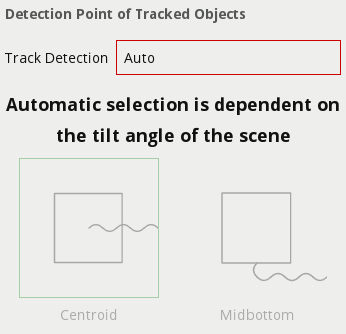
Schwerpunkt
In diesem Modus wird der Erkennungspunkt zwangsläufig auf den Schwerpunkt des Objekts festgelegt.

Mitte unten
In diesem Modus wird der Erkennungspunkt zwangsläufig auf die Mitte der Unterkante des verfolgten Objekts festgelegt.
Normalerweise ist dies der Bodenkontaktpunkt des Objekts (der Schnittpunkt des Objekts mit der Bodenebene).

Manipulationserkennung (Objekt-Tracker)
Erfahren Sie mehr über die Manipulationserkennung.
Intervall für die Signalsignalisierung bei Signalverlust
Siehe Intervall für die Signalsignalisierung bei Signalverlust
Deep-Learning-Personenerkennung
Die Deep-Learning-Personenerkennung wurde entwickelt, um Personen in Situationen zu verfolgen, in denen sich das Kamerasichtfeld relativ nah befindet.
Der Deep Learning People Tracker basiert auf der Pose-Estimation-Technologie und liefert die Position einer Person im Sichtfeld sowie zusätzliche Metadaten zu Schlüsselpunkten an den Körperteilen.
Die Hardwareanforderungen für diesen Algorithmus finden Sie unter „Deep Learning-Anforderungen“.
Der Deep Learning People Tracker verfügt über die folgenden Einstellungen:
Manipulationserkennung (DLPT)
Erfahren Sie mehr über die Manipulationserkennung.
Intervall für Signalverlustmeldung
Siehe „Intervall für Signalverlustmeldung“
DL People Tracker aktivieren
-
View Channels öffnen
-
Kamera auswählen
-
Tracking öffnen
-
Öffnen Sie die Tracking-Engine über das Dropdown-Menü und wählen Sie DL People Tracker aus
Deep-Learning-Objekt-Tracker
Der Deep-Learning-Objekt-Tracker wurde für die präzise Erkennung und Verfolgung von Personen, Fahrzeugen und wichtigen Objekten in schwierigen Umgebungen entwickelt, in denen bewegungsbasierte Verfolgungsmethoden an ihre Grenzen stoßen würden.
Nachfolgend finden Sie eine Liste der Objekte, die vom Deep-Learning-Objekt-Tracker erkannt werden:
|
Klassenname |
Beschreibung |
|---|---|
|
|
Eine Person oder ein Objekt, das von einer Person bewegt wird (z. B. ein Fahrrad) |
|
|
Ein Motorrad |
|
|
Ein Fahrrad |
|
|
Eine Person auf einem Fahrrad kann als zwei separate Objekte erfasst werden |
|
|
Ein Bus |
|
|
Ein Auto |
|
|
Ein Kleinbus, einschließlich Minivans und Minibusse |
|
|
Ein Lkw, einschließlich Lastkraftwagen und Nutzfahrzeuge, |
|
|
Ein Gabelstapler |
|
|
Ein Rucksack oder eine Reisetasche (Sporttasche) |
Der Deep-Learning-Objekt-Tracker basiert auf einem Klassifizierungs- und Erkennungsmodell und ermittelt die Position eines Objekts im Sichtfeld. Die Hardwareanforderungen für diesen Algorithmus finden Sie unter „Deep-Learning-Anforderungen“.
Der Deep-Learning-Objekt-Tracker verfügt über folgende Einstellungen:
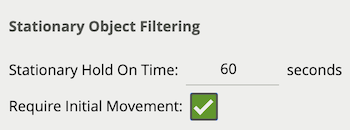
Filterung stationärer Objekte
Siehe „Haltezeit für stationäre Objekte“
Zusätzlich zur „Haltezeit für stationäre Objekte“ steht die Einstellung „Anfängliche Bewegung erforderlich“ zur Verfügung, die verhindert, dass Objekte verfolgt werden, die sich nicht bewegt haben.
Erkennungspunkt der verfolgten Objekte
Siehe „Erkennungspunkt der verfolgten Objekte“
Manipulationserkennung (DLOT)
Erfahren Sie mehr über die Manipulationserkennung.
Intervall für die Signalsignalisierung
Siehe „Intervall für die Signalsignalisierung“